Introduction
This note reports some new data from a series of researches that I am performing in Archivio dellOspedale degli Innocenti (AOI), in Florence. There is no need to repeat here what I have already described about this archive in a previous note.(1) There is however something that distinguishes this research from the others. The particular seller encountered here does no longer belong to merciai, but it is two silk-dealers associated, Lorenzo di Bartolo and Matteo di Zanobi. This does not greatly change the situation: silk-dealers could offer some "additional" goods in their workshops too, and also playing cards could be acquired there.
Another distinguishing fact for this research is that this particular source has been indicated to me by Thierry Depaulis(2), who found the corresponding quotation in an article(3) where several unpublished documents on trades and contracts were discussed involving renowned painters and sculptors of the time. This has been a determinant indication, because for the moment I was searching only among the merciai account books. I had in program to check also some account books of silk-dealers (more frequent in AOI, especially for later times), but only after those of merciai. The suggestion by Thierry Depaulis has thus introduced a significant change in the schedule of my researches, and he deserves part of the merit for the results obtained.
Let me get by without any further comment on the fact, already mentioned, that I have been led to this Florentine research by Thierry Depaulis, a historian living in Paris, and by Dario A. Covi, a professor of the University of Louisville, Kentucky.
The account books
Seven account books of the series, Entrata e uscita (1437-1461), can be found in the inventory of AOI(4) for the association of two silk-dealers, Lorenzo di Bartolo and Matteo di Zanobi. As usual, these books belong to different kinds, among which I had already found that of Ricordanze to be the most useful for us. Here, more than in the other parts, long lists of the individual items of a given purchase can be found. Our playing cards are items that could easily be sold without being mentioned, among many other more important goods, silks in this case.
There is only one of the seven books, which exactly covers the time interval indicated by Covi.(3) This is book No. 12793, titled "Uscita C" (17/10/1446 - 02/11/1461). I just leafed through this book, postponing an accurate study of its information to later times, and focused instead my attention to the following series of three books of Ricordanze, which appear to have been compiled one after another: No. 12794 «Ricordanze A» (01/03/1437 - 17/11/1441), cc. 96, No. 12795 «Ricordanze B» (27/06/1441 - 05/10/1446), cc. 142, No. 12796 «Ricordançe C» (12/10/1446 - 23/03/1457), cc. 136.
The three remaining books I have also leafed through: further data can be extracted from them too, and a sort of continuation of this note is likely to appear in the next months, if I will have time and patience enough. Let me limit now to describe and discuss the information on naibi sales recorded in the three Ricordanze books indicated.
The sales of naibi
Several interesting information can be deduced from the list of sales of these silk-dealers. First of all, it is easy to ascertain that this was a different kind of sellers with respect to merciai. It is true that we could also find playing cards on sale, but the choice of goods offered was more limited than in the case of a merciaio store. Most sales were really concerned with silks; if other items were present, usually they only corresponded to a small part of the sale. If I should mention something more frequent than usual, except silk goods, I would say knives and penknives. Other "unusual" goods were also sold, such as cymbals or ivory combs. Understandably, the greatest difference with respect to a merciaio store is the almost complete absence here of ironware and tools.
The sales of playing cards had here a particular character. A few merchants, among those who acquired silks at this workshop, sometimes inserted in their lists also playing cards. It seems that we have found here the starting point corresponding to what had been found in Rome:(5) we obtained there a list of merchants who mainly imported wool and silks; sometimes, playing cards were present in the set of goods passing the customs. The size of trade here was however much less: makers and sellers of this kind were called setaioli minori, different from setaioli maggiori, with much greater goods and money exchanges.
Naibi only were a little part of the whole trade: here, nobody comes to the shop to acquire just naibi. Moreover, merchants who acquire naibi are few. I believe that anybody in Florence had better suppliers, whenever he wanted to acquire naibi packs, to begin with the makers themselves.
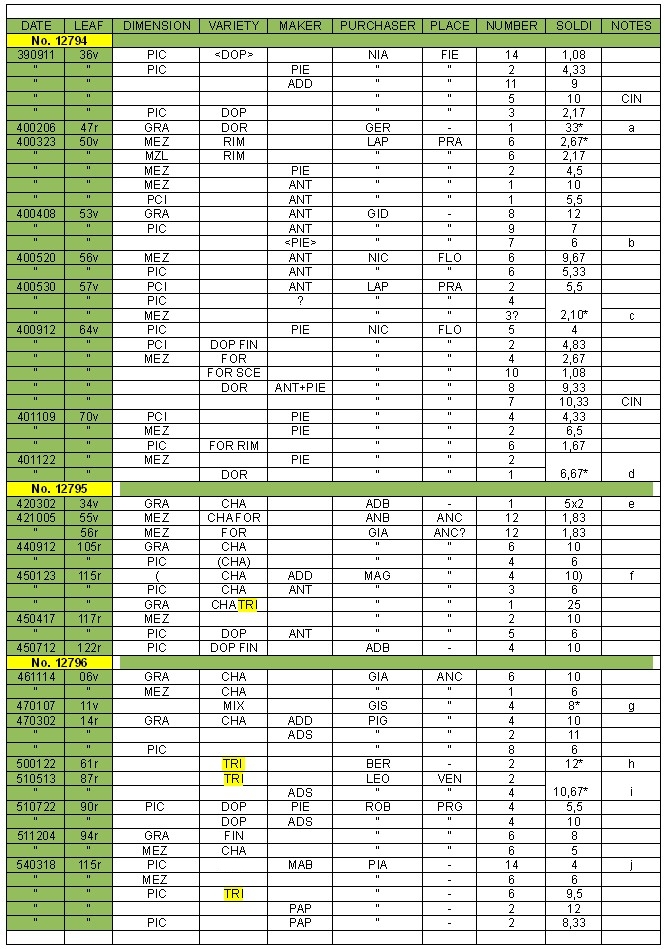
We are now ready to analyse the three following Tables, which I have extracted from the three Ricordanze books. For reducing the size of the Tables, I have used many abbreviation: their meaning is explained in the corresponding list after the conclusion.
The records have been listed in ten columns: 1 the date, in the format 14yymmdd, 2 the leaf in the book, 3 the attribute indicating the card size, 4 any attribute defining the variety of the packs, 5 the makers, 6 the purchasers, 7 the place where the purchasers were active, 8 the number of packs sold (using packs as unit even in the few cases in which they were sold by the dozen), 9 the unit price in soldo, 10 any additional information or comment.
As for prices, the money system was L.s.d. with 12d. making 1s. and 20s. making 1L. I have reduced all these prices to soldo (s.), and this explains the many cases of approximate values, typically corresponding to the presence in the price of 4d. or 8d., namely 4/12 or 8/12 of 1s. respectively.
Playing-cards are currently called naibi here, as usual, but the more modern word of carte can often be found for them, with its normal spelling of charte. Whereas naibi are univocally determined, the use of the carte name may be misleading, because it was attributed to paper sheets as well. In the case of 2 March 1442, the usage of the "pair" unit may help: if you have one pair that costs twice the unitary prices, as here, this is probably two paper sheets, because one pair of naibi corresponds to just one unit. It is however possible that there is a mistake in this record, because new paper sheets were not sold by pairs, but rather as reams, and carte dipinte or painted cards, usually of religious character, are not present in other trades here.
The sales of cards are not constant with time; in some years we find many packs sold, less in other years, and not at all in 1441, 1448, 1452 and 1453. The probability that playing cards were sold also in those years is nevertheless high; again, more than a question of sales, it seems to be a question of the corresponding records - especially for the last two years mentioned, we observe less and more concise records for other goods too.
|

Research Revolutions
Some time ago (2003) Ross Caldwell and myself started to collect early Trionfi documents. A major research progress had been done then by the publications of Franceschini/Ortalli in 1993/96 and Franco Pratesi a short time before, articles, which more or less stayed unknown in other publications. In the following years very seldom entries were added for the early time of Trionfi card development till 1463/64 .... till October 2011. Ross Caldwell noted then a new work of Arnold Esch (2007), who had researched custom registers in Rome and detected there lots of playing card notes of 15th century, between them also some Trionfi cards and at least two of them relating to the years 1463 and 1464. Esch wasn't really interested in playing cards, and the real source (the archive in Rom should contain much more material. In the internal discussions it became quickly clear, that a more precise research of this material would mean a revolution for Italian playing card research. So we asked Franco Pratesi for some help.
The old list (October 2011) contained 34 entries, from which 2 were insecure. As some of them related to more than one context, the following rough overview has some more entries than 34:
1 Malatesta (1452)
1 Siena (1452)
1 Ancona (?1460)
1-2 Bologna (?1442 + 1459)
1-3 Padova (1455 + ?1449 + ?1461)
2 Florence (1450 + 1463)
2-4 Milan/Cremona (?1441 + 1450 + 1452 + 1457)
3 Iacopo Antonio Marcello (1449 + 1461)
23 Ferrara (1442-1463)
It's easy to recognize, that this old list was dominated by the Ferrarese documents.
|
|
Naibi purchasers
Particularly remarkable is the fact that the number and kind of purchasers of playing cards were only a small fraction of those recorded in the books. Most of them were colleagues silk-dealers. Cards can be found as acquired together with silk and other goods within rather long lists of goods that were purchased by a given merchant, often to be further sold far from Florence.
In the course of time, we encounter the following purchasers:
ADB Antonio di Brunetto e Brunetto suo figliuolo,
ANB Antonio di Beltramo,
BER Bernardo dUguccione Comp. merchatante,
GER Gerardo di Pagholo e comp. Setaiuoli,
GIA Giannino dAntonio gharzone di Giano merciaio da Bergamo che usa per la Marca,
GID Giovanni di Datto(?) e comp. chorregiari,
GIS Giannino di Simone merciaio da Berghamo che usa per la Romagna,
LAP Lapo di Curino(?) speziale a Prato,
LEO Leonardo di Tomaso forzerinaio,
MAG Martino di Giovanni di Pellegrino da Bergamo merciai,
NIA Nicholo di Nardo e Antonio di Iachopo merciai,
NIC Nicholajo di Chalvano setaiolo in piazza dei Signori,
PIA Pier Antonio di ser Barnaba e comp. merciai,
PIG Piero di Giovanni di Pellegrino da Berghamo chiamato Barchetto merciaio sta a Ancona,
ROB Ruberto di ser Bartolomeo da Perugia e comp. mercatanti.
One family of purchasers is present more than once and may be taken as a useful example. This family comes from Bergamo and is often indicated with the name of the grandfather, Pellegrino, or maybe with a family name Pellegrini in each case we find as purchaser one of his sons or grandchildren, or one of their boys, as Giannino dAntonio.
At the time, Bergamo, as Milano and Brescia in the same area, was a typical supply of ironware, but these merchants had moved the center of their activity to Ancona. Moreover, they are indicated as active not only in that town, but in the whole Marche region; one of them (if he did not belong to another family from Bergamo) is indicated as active in Romagna. One of their purchases is particularly indicative: these goods were taken to be traded in a fair, fiera della Vernia(?).
Following the purchases of this family provides a more complete and correct view of the situation, with respect to what may be deduced simply from the Tables extracted from the book. As a matter of fact, we find many more purchases by this family than recorded in the Tables. This has two different reasons: the first is that sometimes they buy a more or less long list of items, without any card packs included. This is not too misleading for us¸ since we are just interested in their purchases of playing cards: if they come and buy nothing of this kind, it is exactly the same for us, as if they had not entered the shop at all.
There is however a second reason, which does not allow us to analyse these data in a statistically reliable way: sometimes, the list of the goods acquired is not reported at all. We find the date, the names, and the total amount of the purchase; it could even contain card packs, but we cannot deduce anything about their number, kind, and price. Something similar I had already indicated for Puri merciai, whose account book became more concise for the last months.(1) Something similar could have occurred for any seller and any purchaser: the account books were kept for balancing purchases and sales: it was essential to record the overall value of the goods, but not the single items traded.
Other purchasers come from different places. Ruberto or Roberto di ser Bartolomeo is a merchant from Perugia, Lapo from Prato. We have thus established that most naibi packs were purchased for a further trade, far from Florence. Possible explanations are that more suitable dealers existed in Florence for acquiring cards for local use, or even that any sale for local use was forbidden. (We have to remember that only in 1450 four card games, including trionfi, were allowed here.)
The presence of one purchaser is however enough to let the latter hypothesis become hardly tenable: Nicolao di Galvano is a fellow silk-dealer, active in the very centre of Florence. His location is stated as in front of Palazzo dei Signori, now Palazzo Vecchio. Moreover, in all the cases, in which the place of origin or activity of the purchaser is not indicated, it may be assumed to be Florence.
Cardmakers
Useful information we obtain on cardmakers. Some packs on sale in part were directly designated with the name of the maker. This was not the case for the cheapest cards, but it became increasingly the rule in correspondence to higher prices. This was not however an exclusive property of the most expensive packs sold for 10s. and more; also middle-priced packs at around a half of those prices can be found with the name of their maker. Evidently, these painters did not only produce costly packs on demand, but provided the sellers with some "standard" supply of their continuous production.
It is somewhat surprising that the number of makers that we find quoted in the course of about fifteen years is relatively small, as follows.
ANT Antonio,
ADD Antonio di Dino,
ADS Antonio di Simone,
MAB Matteo Ballerini,
PAP Paparello (Iacopo di Poggino di Luca),
PIE Piero Piccino,
It is possible that another maker is mentioned, CIN Cinchaglie(?). The problem here is that on the one hand I am not sure to have read correctly this name, possibly a nickname; on the other hand, it is also uncertain whether this name could instead be attributed to some quality of the cards.
Antonio, when quoted without family or father name, could be identical with one of the two following ones, or else with Antonio di Giovanni di Ser Francesco, or with Antonio di Luca, known from Catasto 1430 and 1427, respectively. Piero is sometimes present here (for ex. 12794, c.64v) with the nickname of Piccino and thus we cannot be sure whether we are in the presence of one or two Piero makers. Known from the literature is Piero di Donnino di Giovanni, and it is hard to say at present how many Piero were involved in the production of playing cards at the time.
Surprisingly, most of the makers recorded in these books were unknown to us. On the other hand, we find no trace of other renowned painters of naibi, such as Giovanni di ser Giovanni, or Filippo di Marco di Simone. The impression is that also for suppliers, as for purchasers, our silk-dealers had adopted some privileged channels for their trade.
Trionfi
Most readers may consider particularly interesting the information on trionfi, in view of the relative early times for their occurrence on sale.
The first sale in which I have found the name of trionfi mentioned here is on 23 January 1445 to Martino di Giovanni. First we find a line of text with "4 paia di charte dAntonio di Dino a 10s. paio". To this line no total price is associated and, even if it has not been deleted, I believe that this line was actually replaced by the two following ones: "3 paia di charte pichole dAntonio per s.6 paio montano L.-s.18", and "1 paio di trionfi di charta grandi per s.25 paio montano L.1s.5". Of course 25s. is much more than 6s. of the other packs. However, we have two variations to take into account, from piccoli to grandi and from carte to trionfi, in either case with about a doubling of the price. Instead of the 40s. that we could deduce from the "mean" sale of 4 packs at 10s., we only have 3 additional soldo to pay.
Interesting is the explicit mention of carta to be intended here as paper; this appears to me justifiable by either of the following explanations: trionfi made with paper, as if other kinds, typically using vellum, were also common at the time; trionfi di carta, as the other frequent indication of trionfi da giocare, in order not to confound them with other triumphal objects or occurrences I prefer the latter explanation.
Then we find two packs of trionfi sold on 22 January 1450 to Bernardo. In this case trionfi have an attribute that I could not read with certainty "2 paia di trionfi da gugliare(?) a s.24 tutti dachordo L.1s.4". The price of 12 soldo for a pack has been agreed upon. As soon as I became convinced that the attribute could be read as da guchare, giuchare, giocare which is indeed a rather common attribute for trionfi cards I have asked two experts for assistance and confirmation: they have both rejected my reading and left me with an unknown word to explain!
The following sale of 13 May 1451 has some further useful information. The purchaser is Leonardo di Tomaso forzerinaio and he interestingly informs that these goods he buys to be forwarded to Venice: "dise per portare a Vinegia". The leading role of the Venice international market is well known, but few early Venetian documents are available on our subject.
Leonardo acquires "dua paia di trionfi e 4 paia di naibi dAntonio di Simone per tuto dachordo L. tre et s. quatro". Namely, the total price has been agreed upon, in a way that does not allow us to derive the exact price of trionfi. Also the indication of either piccoli or grandi is missing. Let us speculate on possible prices: if the four naibi packs were grandi, at a reasonable price of 10s. a pack of trionfi could be priced at 12s.; if the four naibi packs were piccoli, at a reasonable price of 6s., a pack of trionfi could be priced at 20s. I thus suppose that the two cases indicated of 12s. and 20s. may be taken as reasonable limits for the price of these trionfi.
Then we arrive at the last mention that I have found up to now, Piero Antonio di ser Bernaba on 18 March 1454. "6 paio di trionfi picholi a s. nove d. 6 paio L.2s.17." The maker is not indicated but all the packs of naibi bought together were made by Paparello; this may suggest a relatively high quality for trionfi too. Nevertheless, their unit price of 9.5s. appears rather low, even if the piccoli format has to be considered.
The simplest deduction here is that the production of trionfi had already become widespread, as may be indicated also by the ratio 6 to 4 of trionfi to naibi packs acquired in this case. It must however be reminded that the packs of trionfi recorded here are still too few to allow any indubitable deduction, not to mention a statistical evaluation of prices and qualities.
One conclusion appears to be possible, nevertheless: there was a greater divergence in prices between packs of "simple" naibi differently produced, then one could find between naibi and trionfi. In other words, a pack of trionfi already was a rather current pack of cards.
Conclusion
The information that I have extracted from the account books of silk-dealers is of the same kind as that derived from merciai.(1) Again, playing cards are only a very small part of the trade, possibly even less important here. Moreover, it appears as a certain fact that an unknown fraction of the playing cards sold was recorded: for many purchases, the total amount was indicated without recording the single items traded.
With respect to the previous note, we find here a longer time interval, covering almost fifteen years. Some useful information has been derived on the purchasers and the locations where they were active. Also a few names of cardmakers have been collected from these records, most of them unknown up to now.
Alongside of naibi, we find a few packs of trionfi among the items sold. These packs had prices not remarkably different from those of naibi of a similar quality; seemingly, there was a decrease of trionfi prices in the years involved.
Footnotes:
(1) Franco Pratesi: Naibi on Sale
(2) Thierry Depaulis, Personal Communication, 04/02/2012
(3) Dario A. Covi, Prospettiva, No. 12 (1978) 61-72.
(4) Istituto degli Innocenti
(5) Arnold Esch, Economia, cultura materiale ed arte nella Roma del Rinascimento. Roma 2007; see Google-Snippet-View
|

Now it's 8 March 2012
Counting through all these new reports for the list, I find, that there are (at least) 22 new entries between 1440-1464, roughly 60 % more as there had been in October 2011. That's indeed a remarkable progress for a few months, considering that the earlier 34 had 200 years and more to find to our attention.
First there was Ross, who with the base of Arnold Esch's book found a few notes, from which at least two reach the range of 1463 and 1464. One of these notes speaks of "316 Triunfi" decks, a number, which isn't reached by other earlier documents, and this surely indicates, that at least in this time we have a mass production factor. Both "counted notes" likely refer to an import to Rome from Florence, but this isn't sure.
Franco went then through the complete Esch book and found another note from 1453. 8 Triunfi decks were imported to Rome by Giovanni da Pistoia, who possibly worked in Florence. This was in begin of November 2011, Franco added a further research later. However, Franco, himself living in Florence, considered the work with the Roman archive as problematic, and found more interest to research Florentine material. His first report about this study didn't give reason to much optimism. It seemed to be a case of finding the "needle in a hay-stack".
Anyway, nonetheless Franco detected a series of Trionfi production notes around a not well known card producer Filippo di Marco (Florence naturally) between 1453-58, in context of the business of an art dealer Bartolomeo Serragli. The success was based on a study done in the 1950s and 1960s by Gino Corti and Frederick Hartt, who failed then to realize, that the mentioned objects were playing cards. 11 Trionfi notes, this was a big fish and the hidden Filippo di Marco proved as man of great Trionfi card dimensions similar to Sagramoro in Ferrara.
A single further note arrived around Christmas from Ferrara from the work of Veber Gulinelli, "Delle carte da Gioco Italiane Storia e diletto". It seems, that it was earlier overlooked by Franceschini (from "14 Lug. 1460").
Thierry Depaulis surprised at begin of February 2012 with a new "oldest Trionfi note" from September 1440, reported by
Nerida Newbigin about the work of an Anghiara notary and public official Giusto Giusti in "Il Giornali di ser Giusto Giusti d'Anghiari (1437-1482)" in Letteratura Italiana Antica, III, 2002. The deck was produced in Florence and was brought to Sigismondo Malatesta by Giusto Giusti himself. The price was in the dimension of the highest paid prices in Ferrara.
Franco adds with this article 4 further Trionfi notes (early March 2012) from 1445 (Ancona), 1450 (unknown), 1451 (Venice) and 1454 (unknown) from the byway business of two silk traders, both (again) naturally from Florence. They are part of 23 recorded deals with playing cards within 15 years. The note of 1445 is - for the moment - the 4th-oldest of all Trionfi notes.
Franco has two other new entries, which are more or less "unpublished" in the moment (1450/51), both Trionfi allowances in smaller towns in the Florentine region.
From the 22 new documents possibly 21 (or a little less) refer to Florence, so the earlier dominance of the Tarot city Ferrara is broken. Totally there are now 56 documents, from which 24 belong to Ferrara, and possibly 23 (or less) to Florence.
3-4 documents between 1440-1442
Only 1 to 1443-1448
12 documents between 1449-1452
Still the statistic gives the impression, as if there had been a blocking condition (prohibition ?), which hindered the quick distribution of the game in the years 1443-1448.
|
|